

برای فهم دقیق چگونگی کنترل کواد کوپتر با استفاده از رادیو کنترل و آموزش پرواز کوادکوپتر حتما .باید یک رادیو به دست بگیرید و خودتان پرواز را به صورت کامل تجربه کنید. با اینکه در ابتدا این کار به نظر کمی دشوار می آید اما بدون شک با تمرین به زودی مفهوم دقیقی از پارامترهای رادیو کنترل و فاکتورهای آن خواهید داشت. به مرور می توانید پرواز دقیق تری با کواد کوپتر خود به نمایش بگذارید و خطای کمتری در تعیین موقعیت آن در آسمان داشته باشید.خرید کمجددا تاکید می کنیم که برای آموزش پرواز کوادکوپتر بهتر است یک کوادکوپتر ارزان قیمت تهیه کنید تا صدمات ناشی از کنترلی ناشیانه آن برایتان اهمیت چندانی نداشته باشد.
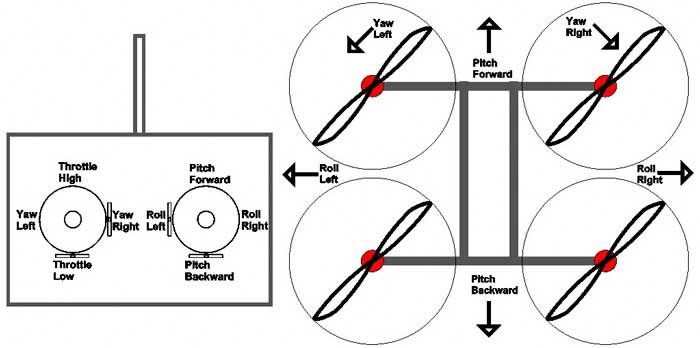
چهار فاکتور اصلی در کنترل یک کوادکوپتر به شرح زیر است:
- Roll
- Pitch
- Yaw
- Throttle
نمایش چهار فاکتور اصلی در کنترل یک کوادکوپتر به صورت طرح وار
حال زمان آن رسیده تا به بررسی دقیقتری از هر فاکتور بپردازیم.
Roll
همانطور که در فصل اول این مقاله گفته شد ، Roll کوادکوپتر را به چپ و راست حرکت میدهد. این کار با تغییر جوی استیک سمت راست، به چپ و راست امکان پذیر است. هر بار که استیک سمت راست رادیو را به چپ و راست حرکت میدهید، کوادکوپتر شما به همان سمت متمایل شده و حرکت می کند.
در تصویر زیر نمونه طرح واری از این مفهوم نشان داده شده است. به جهت کوادکوپتر و همچنین زاویه آن نسبت به افق توجه داشته باشید.
نمونه طرح واری از مفهوم رول- به جهت کوادکوپتر و همچنین زاویه آن نسبت به افق توجه کنید.
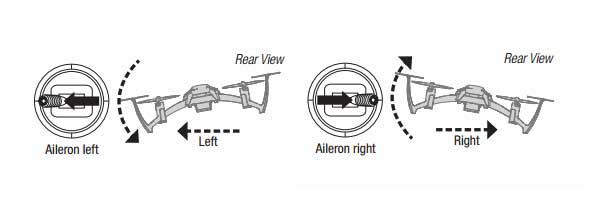
در تصویر بالا موتورهای سمتی از کوادکوپتر که شیب بیشتری دارند با سرعت بیشتری در حال چرخش می باشند. این سبب میشود تا کوادکوپتر به همان سمت متمایل شود چون ملخ ها با سرعت بیشتری هوا را به سمت پایین هل میدهند. هرچقدر بیشتر جوی استیک سمت راست را به چپ و راست حرکت دهید، زاویه کوادکوپتر نسبت به افق بیشتر شده و موتورها با سرعت بیشتری به چرخش در می آیند و پهپاد به چپ و راست حرکت می کند.
Pitch
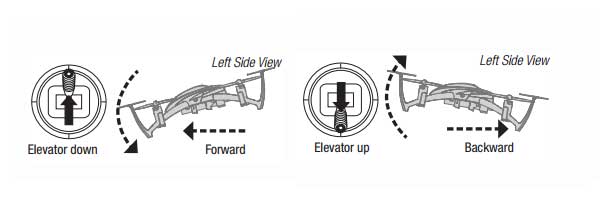
با تغییر جوی استیک سمت راست به عقب و جلو می توانید Pitch را تغییر دهید. این کار باعث میشود تا کوادکوپتر شما به عقب و جلو حرکت کند. دقیقاً همان قضیهای اتفاق میافتد که در قسمت اول گفته شد با حرکت جوی استیک به سمت عقب و جلو موتورهای عقبی و جلویی با سرعت بیشتری حرکت کرده و باعث میشود که کوادکوپتر به آن سمت متمایل شود. تغییر Pitch به صورت طرح وار در شکل زیر نشان داده شده است به زاویه کوادکوپتر نسبت به افق دقت کنید.
تغییر Pitch به صورت طرح وار در شکل زیر نشان داده شده است.
Yaw
شاید مفهوم Yaw در ابتدا برای تان کمی گیج کننده باشد. فقط کافیست کوادکوپتر را مانند یک ساعت در نظر بگیرید که با تغییر Yaw میتوانید آن را در آسمان در جهت ساعتگرد و پادساعتگرد بچرخانید.برای درک بهتری از مفهوم Yaw تماشای ویدیو زیرا از دست ندهید.
Yaw معمولاً به صورت همزمان با Throttle مورد استفاده قرار می گیرد. این کار باعث میشود تا خلبان بتواند الگوهای پروازی زیبایی را پیاده کند. پیادهسازی این الگوها برای ثبت و ضبط تصاویر بهتر از سوژه ها به خصوص سوژههایی که تغییر جهت می دهند بسیار مهم و حیاتی است.
Throttle
با تغییر تراتل یا گاز توسط عقب و جلو کردن جوی استیک سمت چپ روی رادیو کنترل در واقع سرعت موتورها و در نتیجه سرعت چرخش ملخ ها را افزایش و کاهش میدهید و این باعث میشود در مدت زمان کوتاه تری حجم هوای بسیار زیادی توسط کوادکوپتر به پایین هل داده شده و پهپاد به آسمان پرواز کرده و و اوج می گیرد. بنابراین باید حتما یک رادیو کنترل به دست بگیرید تا متوجه شوید چقدر و با چه زاویه ای باید Throttle را تغییر دهید تا بتوانید با سرعت دلخواه به مکان و ارتفاع مورد نظر خود برسید.
نکته مهم :
تمام نکاتی که در مورد چپ و راست و عقب و جلو و جهت های مختلف کوادکوپتر گفته شد در صورتی صحت دارد که سر پهپاد دقیقه رو به روی شما قرار بگیرد. با تغییر زاویه ی سر پهپاد نسبت به شما تمامی جهت ها تحت تأثیر آن تغییر کرده و ممکن است نتوانید به درستی کوادکوپتر خود را کنترل کنید. اما برخی از کوادکوپترها هستند که دارای مد هدلس باشند. این مد این امکان را به خلبان میدهد تا پهپاد را در وضعیت بی سر قرار دهد تا بتواند دستوراتش را عینا اجرا کند.
رادیو کنترل تمام آن چیزیست که به شما اجازه می دهد تا کنترل پهپاد یا کوادکوپتر خود را به دست بگیرید، بنابر این باید بتوانید به خوبی با آن کار کنید تا بتوانید یک پرواز خوب را به کوادکوپتر خود هدیه کنید.خرید کواد کوپتر|خرید پهپاد|خرید کوادکوپتر|خرید پهباد لازمه این مهم چیزی نیست جز آشنایی دقیق با رادیو کنترل ، دکمه های آن و دیگر فاکتورهای کاربردی آن که در این قسمت از مقاله به آن پرداخته شده است.

آشنایی دقیق با رادیو کنترل ، دکمه های آن و دیگر فاکتورهای کاربردی
رادیو کنترل ها در شکل و ابعاد مختلفی ساخته می شود و دارای ویژگی های متفاوتی هستند . ولی بخشهای خاصی از آن برای تمام رادیوکنترل ها و ترانسمیترها یکسان است که در اینجا به معرفی آن بخش ها خواهیم پرداخت.
جوی استیک سمت راست
همانطور که در فصل دوم گفته شد جوی استیک سمت راست برای کنترل roll و pitch مورد استفاده قرار میگیرد.به عبارت دیگر جوی استیک سمت راست، کوادکوپتر را به سمت راست و چپ و عقب و جلو حرکت میدهد.
جوی استیک سمت چپ
جوی استیک سمت چپ به کنترل yaw و throttle اختصاص دارد. به عبارت دیگر کوادکوپتر شما با تغییر جوی استیک سمت چپ می تواند ارتفاع خود را کم و زیاد کرده و در جهت عقربه های ساعت یا برخلاف آن به صورت درجا چرخش کنند.
دکمه های Trim : هر کنترلر دارای دکمه های برای تغییر تریم و تنظیم yaw ، throttle، roll و pitch است که در تصویر زیر نشان داده شده است.

هر کنترلر دارای دکمه های برای تغییر تریم و تنظیم yaw ، throttle، roll و pitch است
ممکن است گاهی به خصوص در زمانی که برای اولین بار کوادکوپتر خود را به پرواز در می آورید متوجه شوید که پهپاد در آسمان به صورت کج پرواز کرده و به یک سمت متمایل می شود. دلیل این امر نامتعادل بودن تنظیمات رادیو کنترل است که با استفاده از Trim باید آن را به صورت متعادل در بیاورید در ویدئوی زیر میتوانید این موضوع را مشاهده کنید.











سلام
کوادکوپتر ky906 دکمه برگشت به خانه ان کجاست؟
کدام دکمه برای ثابت کردن ان در هوا است؟
مقاله بسیار عالی و کاربردی بود. من تازه شروع به پرواز با کوادکوپتر کردم و خیلی از آموزشها و نکات شما استفاده کردم. به نظر شما چه تمرینهایی را باید انجام دهم تا مهارت پرواز خود را افزایش دهم؟
****
با سلام
همانطور که در متن هم ذکر شد، تمرین مدام حرکات دایره ای، بی نهایت و … میتواند بر تسلط شما بر پرواز اضافه کند. سعی کنید به مرور اشکال سخت تری را با کوادکوپتر در آسمان رسم کنید.
سلام لطفاً آموزش پرواز دادن کواد کوپتر D18 رو قرار بدید
سلام RC01پهباد هم لطفاً آموزش بدید